
 在線客服
在線客服
 企業(yè)微信
企業(yè)微信


核心提示:以大型空間站、大型空間太陽能發(fā)電站、大型空間望遠鏡等為代表的空間大型結構,是未來空間任務的主要發(fā)展方向之一。
我國科學家對太空機器人技術及其在軌組裝技術進行研究
科技日報記者 李禾
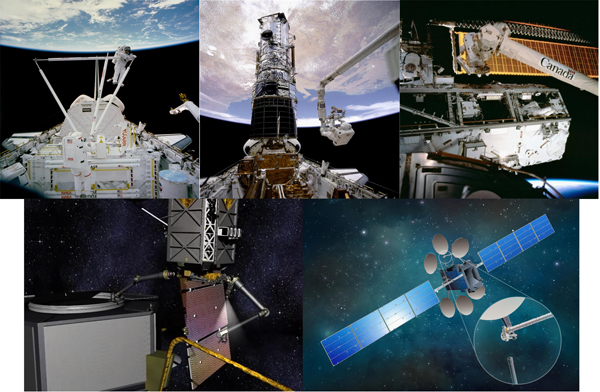
以大型空間站、大型空間太陽能發(fā)電站、大型空間望遠鏡等為代表的空間大型結構,是未來空間任務的主要發(fā)展方向之一。但由于尺度大,空間大型結構不能被火箭或航天器直接帶入太空,因此,需要將其分解成多個模塊化單元,由運載火箭送入太空,之后再進行在軌組裝。在軌組裝是在軌服務(OOS)的一個重要分支,旨在充分利用空間機器人完成空間結構自主組裝。在《空間科學與技術》(Space:Science&Technology)新發(fā)表的論文《面向在軌組裝的空間機器人技術綜述》中,同濟大學湯奇榮教授研究團隊、中國空間技術研究院李德倫等專家和工程師總結了近幾十年來太空機器人技術及其在軌組裝技術方面的研究進展,研討了在軌組裝的規(guī)劃、控制方法、地面實驗的現(xiàn)狀及發(fā)展趨勢。
該論文發(fā)表在期刊《空間科學與技術》的《空間機器人》(Space Robot)特刊中。
論文介紹了空間機器人在軌組裝的總體研究情況,回顧了幾十年來國際、國內(nèi)對在軌服務技術的研究和實踐。目前,空間在軌組裝技術已從人工操作階段逐漸向自主工作階段發(fā)展,工作方式從簡單的輔助航天員操作向自主組裝和維護轉變,任務場景從單一的小型物體變成了復雜的大型結構。但空間在軌組裝技術還不夠成熟,更沒有達到廣泛應用的程度。特別是隨著組裝過程中物體尺寸變大、柔性振動變強、組裝精度變高等特點愈發(fā)顯著,多機器人協(xié)同完成高精度操作的研究亟待深入。
論文綜述了空間在軌組裝涉及的四種關鍵技術的發(fā)展情況。
針對在軌組裝的序列規(guī)劃,虛擬現(xiàn)實技術提供了如何放置不同零件的一種思路,通過人們與組裝過程的虛擬交互,能夠更有效地規(guī)劃組裝順序。事實也證明了智能方法的確能提高組裝序列規(guī)劃的效率和可靠性。
針對在軌組裝的運動規(guī)劃,其本質(zhì)是將航天器從狀態(tài)空間中的一個點移動到另一個點,即航天器在笛卡爾坐標系中的平移和旋轉,論文重點討論了傳統(tǒng)算法,以遺傳算法、蟻群算法、粒子群算法等為代表的仿生優(yōu)化算法,以及基于深度學習、強化學習的規(guī)劃算法發(fā)展。
針對空間機器人組裝任務,論文總結了傳統(tǒng)智能算法、機器視覺和神經(jīng)網(wǎng)絡方法等在組裝空間桁架結構、空間機器人多任務場景中的應用,并指出空間多機器人協(xié)同組裝方法正朝著智能化、分布式、強適應性的方向發(fā)展。
針對在軌組裝的振動抑制和柔順控制,太空中的微重力是引起大型結構振動的主要因素。在組裝過程中存在直接接觸,會產(chǎn)生一定的力(力矩),因此也需要進行柔順控制。目前,柔順控制方式可主要分為主動、被動柔順控制兩大類。其中,主動柔順控制是指通過傳感器獲取接觸力信息,將該信息作為反饋輸入給控制器,對機械臂進行反饋控制,以減小接觸力,達到柔順效果。
據(jù)悉,該論文作者、北京空間飛行器總體設計部高級工程師李德倫主要從事空間機器人、空間機構、人因工程等方面的研究工作。論文作者湯奇榮為同濟大學長聘教授、中德學院副院長,也是同濟大學校務委員會委員,機器人技術與多體系統(tǒng)實驗室負責人,國家高層次人才計劃獲得者。論文作者展文豪為中國航天員科研訓練中心人因工程國防科技重點實驗室助理研究員。
(文中圖片均由《空間科學與技術》期刊編輯部提供)
科技日報記者 李禾
以大型空間站、大型空間太陽能發(fā)電站、大型空間望遠鏡等為代表的空間大型結構,是未來空間任務的主要發(fā)展方向之一。但由于尺度大,空間大型結構不能被火箭或航天器直接帶入太空,因此,需要將其分解成多個模塊化單元,由運載火箭送入太空,之后再進行在軌組裝。在軌組裝是在軌服務(OOS)的一個重要分支,旨在充分利用空間機器人完成空間結構自主組裝。在《空間科學與技術》(Space:Science&Technology)新發(fā)表的論文《面向在軌組裝的空間機器人技術綜述》中,同濟大學湯奇榮教授研究團隊、中國空間技術研究院李德倫等專家和工程師總結了近幾十年來太空機器人技術及其在軌組裝技術方面的研究進展,研討了在軌組裝的規(guī)劃、控制方法、地面實驗的現(xiàn)狀及發(fā)展趨勢。
該論文發(fā)表在期刊《空間科學與技術》的《空間機器人》(Space Robot)特刊中。
論文介紹了空間機器人在軌組裝的總體研究情況,回顧了幾十年來國際、國內(nèi)對在軌服務技術的研究和實踐。目前,空間在軌組裝技術已從人工操作階段逐漸向自主工作階段發(fā)展,工作方式從簡單的輔助航天員操作向自主組裝和維護轉變,任務場景從單一的小型物體變成了復雜的大型結構。但空間在軌組裝技術還不夠成熟,更沒有達到廣泛應用的程度。特別是隨著組裝過程中物體尺寸變大、柔性振動變強、組裝精度變高等特點愈發(fā)顯著,多機器人協(xié)同完成高精度操作的研究亟待深入。
論文綜述了空間在軌組裝涉及的四種關鍵技術的發(fā)展情況。
針對在軌組裝的序列規(guī)劃,虛擬現(xiàn)實技術提供了如何放置不同零件的一種思路,通過人們與組裝過程的虛擬交互,能夠更有效地規(guī)劃組裝順序。事實也證明了智能方法的確能提高組裝序列規(guī)劃的效率和可靠性。
針對在軌組裝的運動規(guī)劃,其本質(zhì)是將航天器從狀態(tài)空間中的一個點移動到另一個點,即航天器在笛卡爾坐標系中的平移和旋轉,論文重點討論了傳統(tǒng)算法,以遺傳算法、蟻群算法、粒子群算法等為代表的仿生優(yōu)化算法,以及基于深度學習、強化學習的規(guī)劃算法發(fā)展。
針對空間機器人組裝任務,論文總結了傳統(tǒng)智能算法、機器視覺和神經(jīng)網(wǎng)絡方法等在組裝空間桁架結構、空間機器人多任務場景中的應用,并指出空間多機器人協(xié)同組裝方法正朝著智能化、分布式、強適應性的方向發(fā)展。
針對在軌組裝的振動抑制和柔順控制,太空中的微重力是引起大型結構振動的主要因素。在組裝過程中存在直接接觸,會產(chǎn)生一定的力(力矩),因此也需要進行柔順控制。目前,柔順控制方式可主要分為主動、被動柔順控制兩大類。其中,主動柔順控制是指通過傳感器獲取接觸力信息,將該信息作為反饋輸入給控制器,對機械臂進行反饋控制,以減小接觸力,達到柔順效果。
據(jù)悉,該論文作者、北京空間飛行器總體設計部高級工程師李德倫主要從事空間機器人、空間機構、人因工程等方面的研究工作。論文作者湯奇榮為同濟大學長聘教授、中德學院副院長,也是同濟大學校務委員會委員,機器人技術與多體系統(tǒng)實驗室負責人,國家高層次人才計劃獲得者。論文作者展文豪為中國航天員科研訓練中心人因工程國防科技重點實驗室助理研究員。
(文中圖片均由《空間科學與技術》期刊編輯部提供)

絡警察")


絡110")