軟銀NAO機器人科學及藝術案列
Alexander Schubert,Katja Mombaur - IWR 德國跨學科計算機科學中心
Michael Raschke – 曾執(zhí)教于IWR,現(xiàn)執(zhí)教于視覺與互動系統(tǒng)教研組VIS,斯圖加特大學
Joachim Funke – 心理,海德堡
機器人、認知科學與藝術項目不僅包括計算機科技和認知科學,還將藝術與機器人與科學知識融于一體,開展跨學科研究。
該項目負責人表示,智能機器人可能在編程控制下成為復雜但富有創(chuàng)意型的藝術工具。智能機器人的繪畫線路可以通過數學算法、點序列或者數據手套運動進行預設。
項目組通過嘗試并比較過不同類型運動錄入所產生的畫作,同時為了通過計算機控制智能機器人的運動軌跡,使用優(yōu)化控制方式解決反向運動學難題。
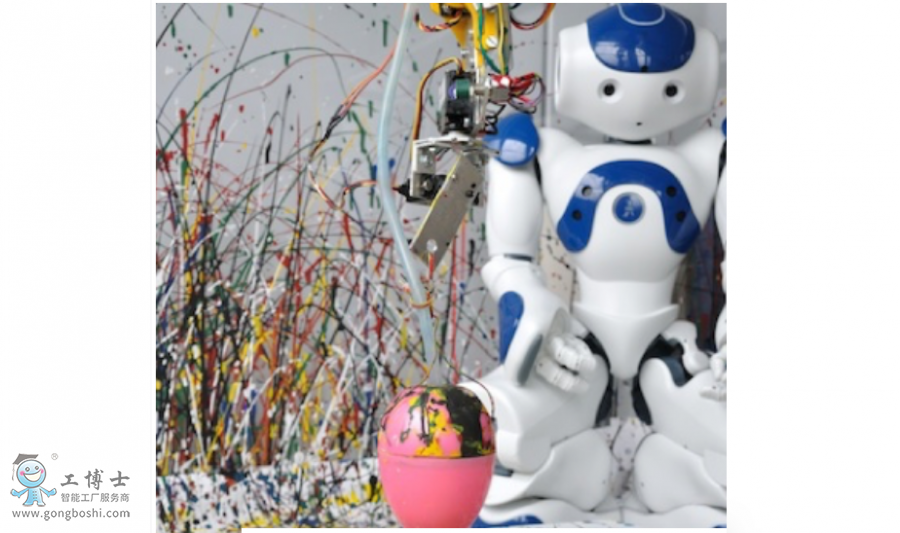
在近期的研究中,項目研究人員建立了認知、感知、評估和藝術工具的數學模型。在心理學和藝術史中,很多都是圍繞著藝術品的特點、藝術作品如何被觀眾感知和評價、藝術的美學價值和藝術家創(chuàng)造作品過程。項目組希望將這方面的研究轉化為數學模型。出于評估的考慮,我們選擇由機器人作為平臺、由人作為評審的方式進行實驗。我們用的機器人包括機器人臂和軟銀人形機器人NAO。
機器人、認知科學與藝術項目組在軟銀NAO機器人基礎上,開發(fā)出杰克遜·波洛克畫派的機器人JacksonBot。
參考文獻:
M. Raschke, K. Mombaur, A. Schubert: An optimization-based robot platform for the generation of action paintings, International Journal of Arts and Technology, 2010, in print
M. Raschke. K. Mombaur, A. Schubert : JacksonBot - Design, Simulation and Optimal Control of an Action Painting Robot,ArtsIT 2009, YiLan, Taiwan, Sept. 2009, Springer Lecture Notes of the Institute for Computer Sciences, Social Informatics and Telecommunications Engineering, 2010, Volume 30, Part 2, 120-127


 在線客服
在線客服
 企業(yè)微信
企業(yè)微信








 [VIP第4年] 指數:4
[VIP第4年] 指數:4 通過認證
通過認證 









