機器人快換接頭是一種設計用于快速更換機器人末端執(zhí)行器的接頭。它通常用于工業(yè)機器人或自動化系統(tǒng)中,以便根據(jù)任務需求更換不同類型的工具、夾具或末端執(zhí)行器。
工博士機器人快換裝置
快換接頭的設計目的是提高生產(chǎn)線的靈活性和效率。傳統(tǒng)上,更換機器人末端執(zhí)行器可能需要耗費較長時間,并且涉及到復雜的接線和重新校準的過程。而快換接頭則通過一種可靠的、快速的連接機制,使得更換末端執(zhí)行器變得更加簡便和迅速。
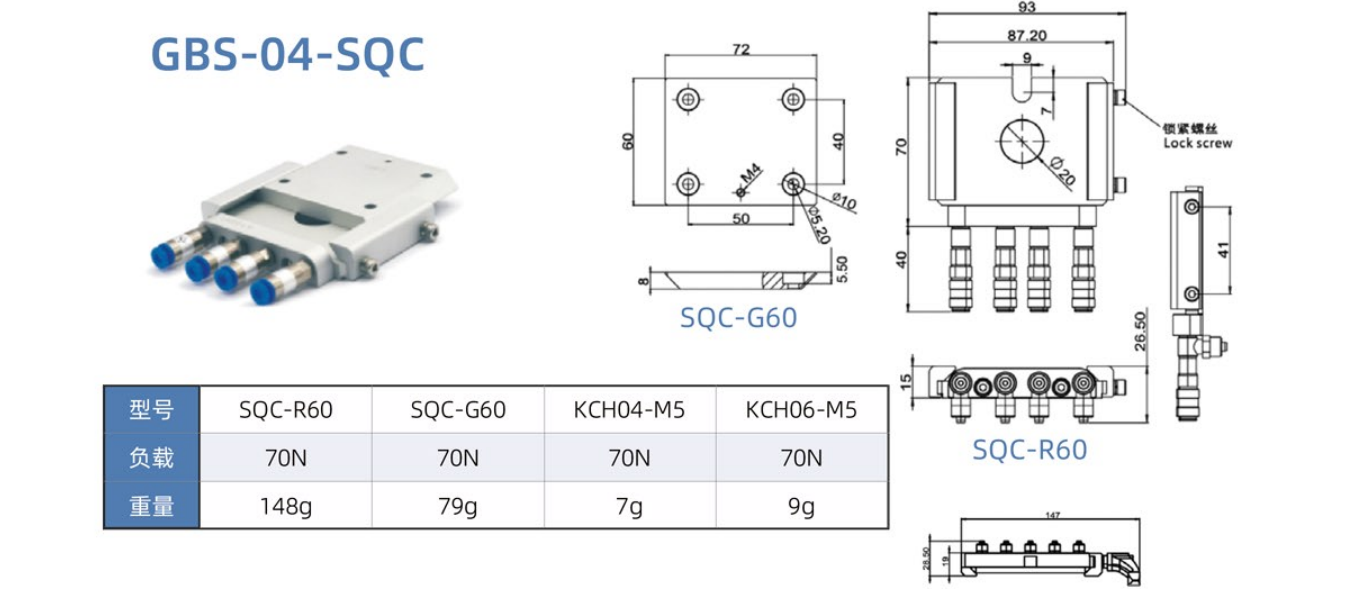
快換接頭通常由兩個部分組成:基座和插頭。基座固定在機器人上,插頭連接到末端執(zhí)行器上。它們通過一種可靠的連接機制,如機械鎖定、磁力吸附或氣動夾持等,快速、準確地連接和斷開。

通過使用機器人快換接頭,操作人員可以快速更換末端執(zhí)行器,從而適應不同的任務需求,提高生產(chǎn)效率并減少停機時間。這在需要頻繁更換工具或在自動化生產(chǎn)線上進行靈活生產(chǎn)的情況下特別有用。


絡警察")


絡110")
 在線客服
在線客服
 企業(yè)微信
企業(yè)微信







 [VIP第3年] 指數(shù):1
[VIP第3年] 指數(shù):1