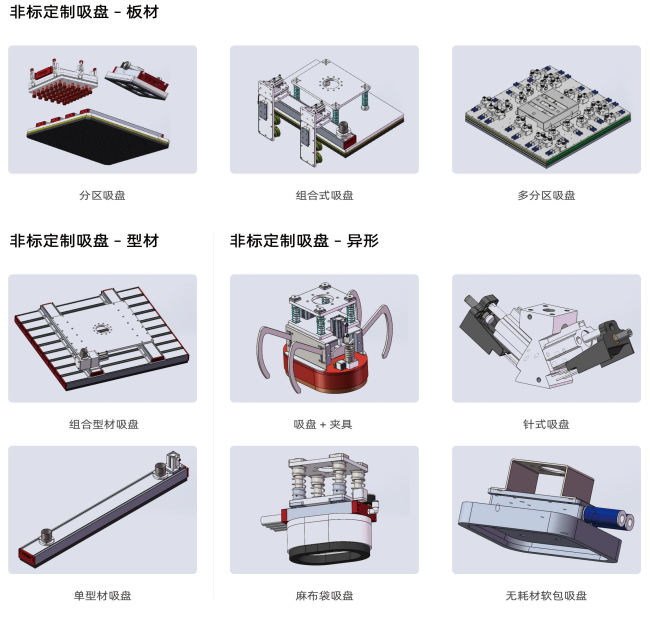
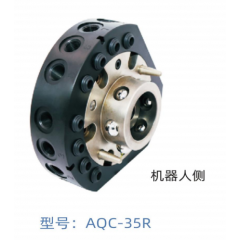
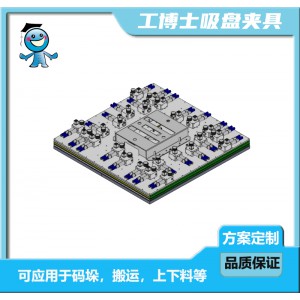
機器人真空吸盤式機械手的真空吸盤通過吸嘴與真空設備抓取物品。真空吸盤是一種密封唇,并在接觸物體后形成一個臨時密封空間,通過泵或稀薄的空氣中的密封空間內,造成氣動執(zhí)行器內外的壓力差。它的名稱也有真空吸嘴、橡膠吸頭、皮碗等。生產的真空吸盤的材料一般是各種橡膠、塑料和金屬。真空吸盤的工作原理是由于真空吸盤的特殊結構,它可以在與物體接觸后形成一個暫時的封閉空間,通過氣動管道或一定的裝置,帶走或薄的密閉空間內的空氣。這樣,密閉空間內的空氣壓力低于外部世界的空氣壓力。因此,內部和外部的壓力差已產生,然后與被提升物體接觸,如玻璃、紙張等,并開始抽吸真空設備,使吸盤內產生負壓,使被提升物體牢牢吸住,然后移動被提升物體。
工博士機器人吸盤夾具作為一個非常重要的機械助力被廣泛應用在很多領域.它能夠自動的根據(jù)設定進行取料定位和移送,在很大的程度上提高了工作效率和生產效率,,如一些工件的搬運加工,還有對一些貨物的裝配等都可以用機器人吸盤來完成,而因為機器人吸盤抓手讓相關企業(yè)不再把繁重的工作交付給工人,也就不再對人力有那么多的要求,從用工方面得到減負。另外采用機器人吸盤的抓手能夠降低工件的損壞,并且令工件的加工品質得到提升。


絡警察")


絡110")
 在線客服
在線客服
 企業(yè)微信
企業(yè)微信





 [VIP第2年] 指數(shù):1
[VIP第2年] 指數(shù):1 通過認證
通過認證