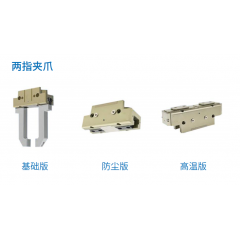
工博士自適應智能機器手
工博士智能機器人手可進行***位置和力控制,具有感知和反饋功能,解決機器人應用成
本高、柔性差、操作復雜等問題。
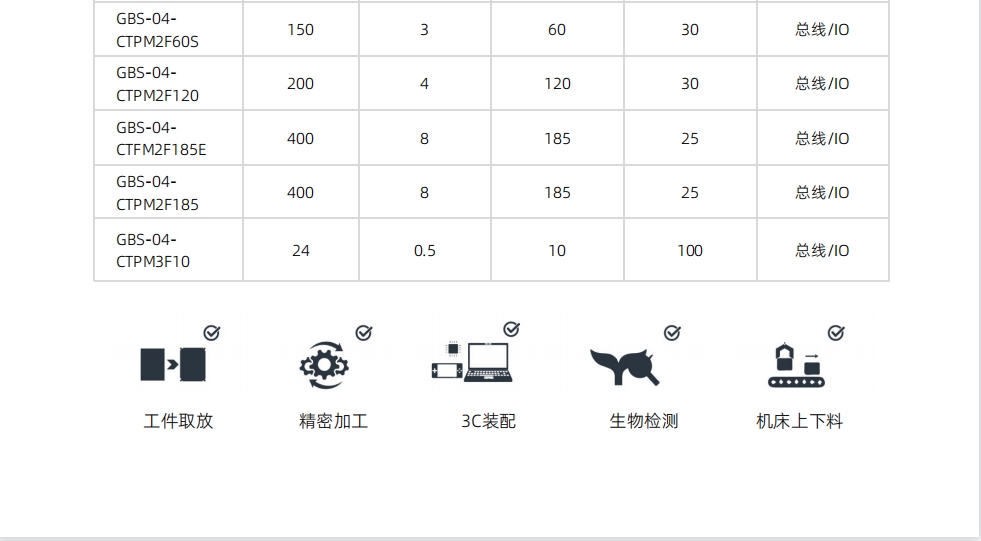
GBS-04- CTPM2F8S
GBS-04- CTPM2F14S
GBS-04- CTPM2F14
GBS-04- CTPM2F20
GBS-04- CTPM2F26
GBS-04- CTPM2F30
GBS-04- CTPM2F40S
GBS-04- CTPM2F40
GBS-04- CTPM2F60S
GBS-04- CTPM2F120
GBS-04- CTFM2F185E
GBS-04- CTPM2F185
GBS-04- CTPM3F10


 在線客服
在線客服
 企業微信
企業微信








 [VIP第5年] 指數:1
[VIP第5年] 指數:1 通過認證
通過認證