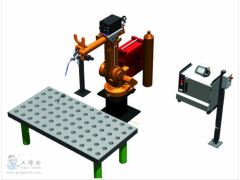
工博士機器人標準焊接工作站
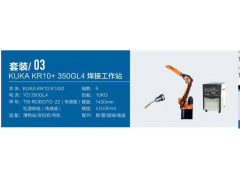
本體: Kawasaki BA006N 軸數:6
電源: Kawasaki KW300A /CM350A 負載:6KG
焊槍: StableArc 內/外置槍 臂展:1445mm
TBI ROBO 7G-L內置/外置 精度:0.06mm
選配: 清槍站/變位機/導軌 配件:板/管/盤軸/底座

工業機器人焊接工作站的工作原理:
工業機器人焊接工作站正常運行的中樞是其控制柜中的計算機系統。
焊接機器人工作站通過計算機系統對焊接環境、焊縫跟蹤及焊接動態
過程進行智能傳感,根據傳感信息對各種復雜的空間曲線焊縫進行實
時跟蹤控制,從而控制焊槍能夠實現規劃軌跡運行,并對焊接動態過
程進行實時智能控制。
其中焊接機器人采用六軸關節型設計,具備六個關節自由度,在工作
中主要依靠智能控制系統實現統一規劃,點焊機器人通常采用示教再
現的工作原理,操作人員通過引導點焊機械臂,一步步按實際任務操
作一遍,機器人在導引過程中自動記憶示教的每個動作的位置、姿
態、運動參數、焊接參數等,并自動生成一個連續執行全部操作的程
序。
成功案例:
標準焊接工作站

企業始終圍繞智能制造產業,致力于打造行業生態平臺,為產業的智
能化自動化升級賦能。工博士機器人成套設備已應用于工程機械、石
油化工、軌道交通、礦山機械、船舶制造、航空航天及軍工等領域。
機器人焊接、機器人噴涂、機器人智能裝配、機器人打磨、機器人碼
垛搬運等自動化成套設備,也已實現了開發、設計、制造的“交鑰匙”
工程。
我們的公司:

榮譽資質

山東分公司

合作品牌


 在線客服
在線客服
 企業微信
企業微信








 [VIP第2年] 指數:1
[VIP第2年] 指數:1 通過認證
通過認證