工博士智能擰緊機器人
1.整體布局
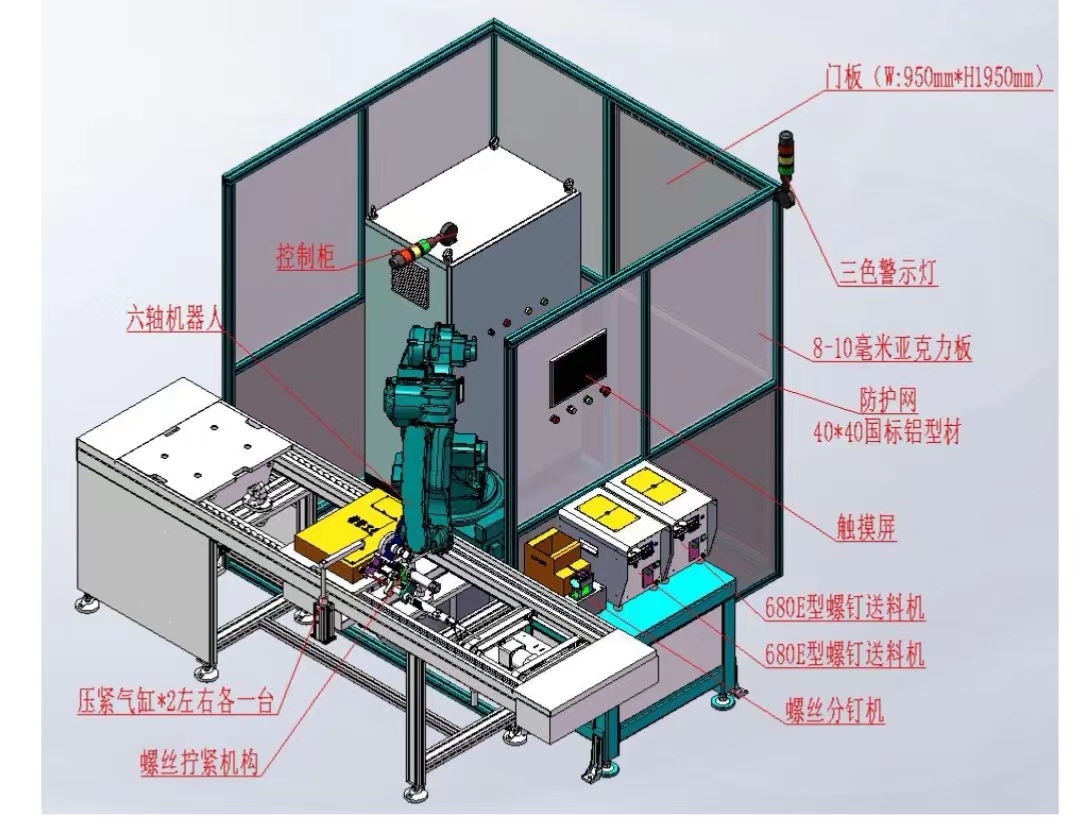
2.產品定位與夾裝
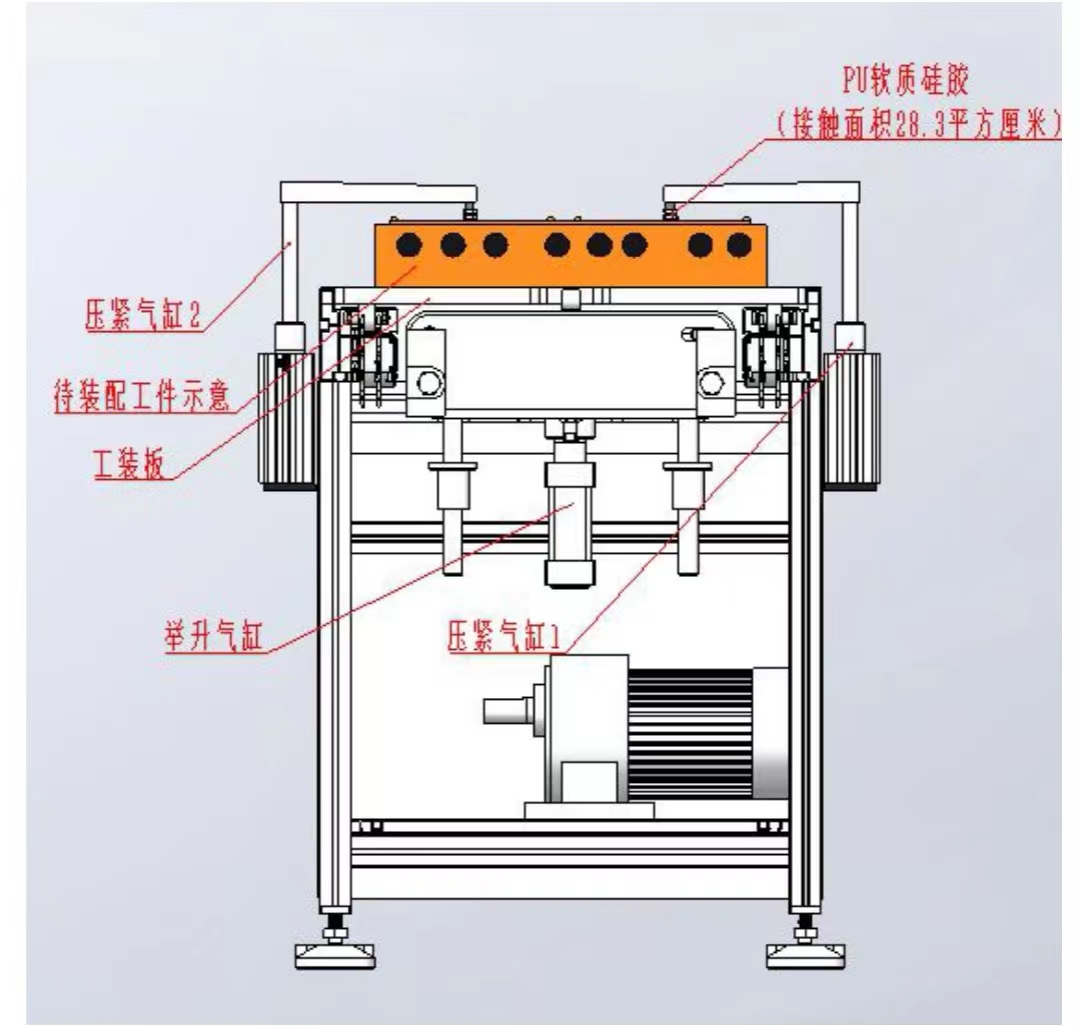
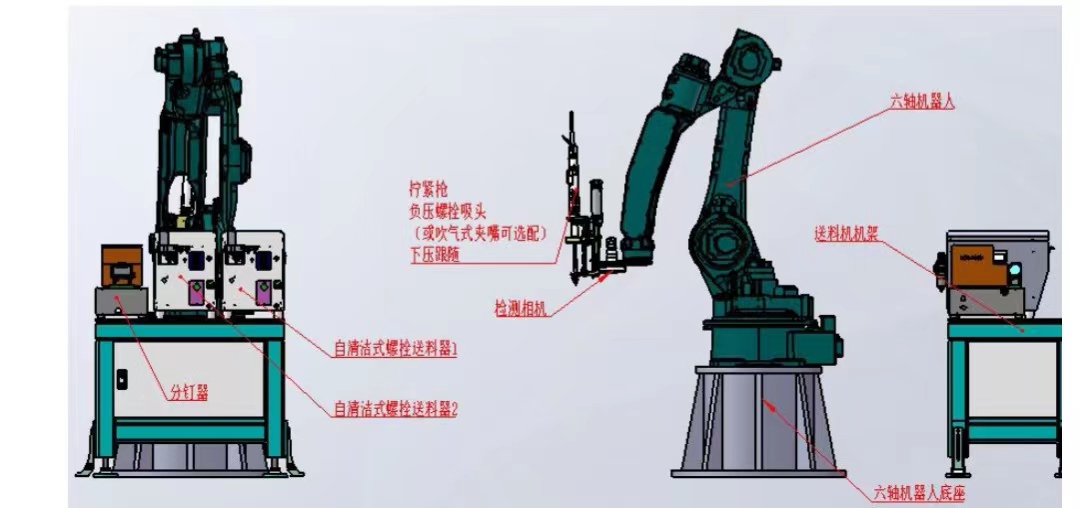
3.螺栓擰緊機器人整體結構
4.機器人自動鎖螺絲機的工作原理:
機器人自動鎖螺絲機由以下幾個部分組成:
1、螺絲供給系統:負責將螺絲從料盤中分選出來,通過氣管輸送到
鎖付頭上。
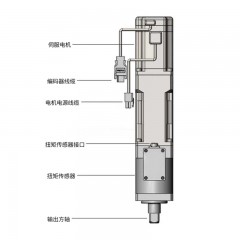
2、鎖付頭:負責接收螺絲,通過磁力或真空吸附在位移傳感器上,
然后根據位移信號調整角度和深度,將螺絲***地擰入預定位置。
3、機械臂:負責控制鎖付頭的運動軌跡,根據編程好的坐標點進行
定位和移動。
4、 控制系統:負責接收外部指令,控制機械臂和鎖付頭的動作,監
測工作狀態和異常情況。
5.產品包裝:


6.關于我們 :
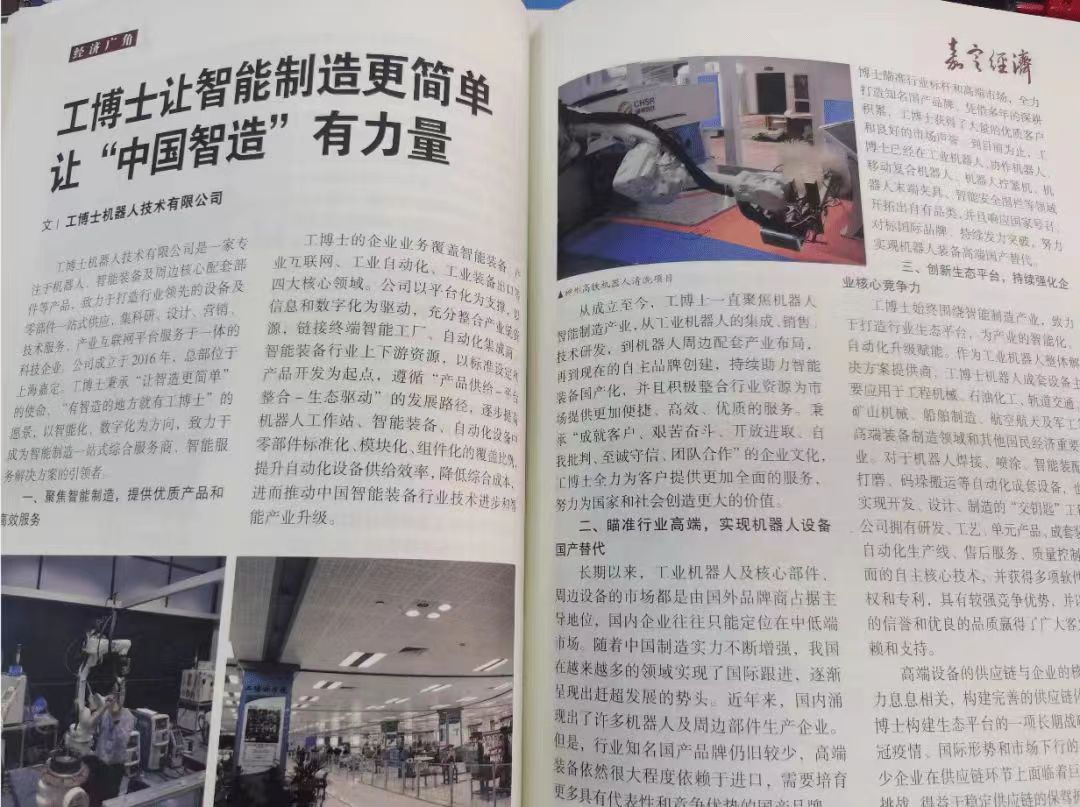
工博士的使命愿景“讓智造更簡單”刊登在《嘉定經濟》
 榮譽資質
榮譽資質
 我們的團隊
我們的團隊
 合作的品牌
合作的品牌


 在線客服
在線客服
 企業微信
企業微信





 [VIP第2年] 指數:1
[VIP第2年] 指數:1 通過認證
通過認證