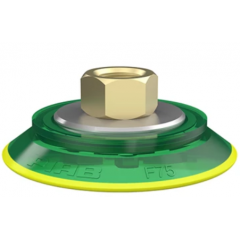
機器人真空吸盤
機器人真空吸盤機械手的真空吸盤通過吸嘴與真空設備抓取物品。真空吸盤(吸盤是一種密封唇,并在接觸物體后形成一個臨時密封空間,通過泵或稀薄的空氣中的密封空間內,造成氣動執行器內外的壓力差。它的名稱也有真空吸嘴、橡膠吸頭、皮碗等。生產的真空吸盤的材料一般是各種橡膠、塑料和金屬。真空吸盤的工作原理是由于真空吸盤的特殊結構,它可以在與物體接觸后形成一個暫時的封閉空間。我們是通過氣動管道或一定的裝置,帶走或薄的密閉空間內的空氣。這樣,密閉空間內的空氣壓力低于外部世界的空氣壓力。因此,內部和外部的壓力差已產生,然后與被提升物體接觸,如玻璃、紙張等,并開始抽吸真空設備,使吸盤內產生負壓,使被提升物體牢牢吸住,然后移動被提升物體。


 在線客服
在線客服
 企業微信
企業微信






 [VIP第4年] 指數:1
[VIP第4年] 指數:1