1. 簡述
農(nóng)業(yè)機器人動作執(zhí)行實訓(xùn)系統(tǒng)由機械手,末端執(zhí)行器及其配套氣路系統(tǒng)和控制系統(tǒng)組成,其中末端執(zhí)行器分為爪割一體式氣動爪和柔性爪兩種。模塊化,開放式的輕型人機協(xié)作機器人讓機器人教學(xué)不再枯燥無味,具有多功能,多組合的柔性爪對不同抓取對象具有較好的互換性。
2.簡介
農(nóng)業(yè)機器人動作執(zhí)行實訓(xùn)系統(tǒng)由機械手,末端執(zhí)行器及其配套氣路系統(tǒng)和控制系統(tǒng)組成,其中末端執(zhí)行器分為爪割一體式氣動爪和柔性爪兩種。模塊化,開放式的輕型人機協(xié)作機器人讓機器人教學(xué)不再枯燥無味,具有多功能,多組合的柔性爪對不同抓取對象具有較好的互換性。
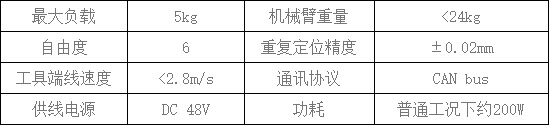
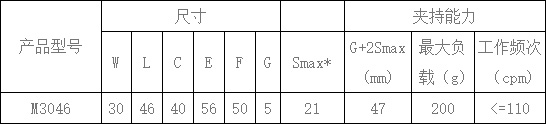
3.性能指標(biāo)
機械臂
多功能手抓


絡(luò)警察")


絡(luò)110")
 在線客服
在線客服
 企業(yè)微信
企業(yè)微信






證")
 [VIP第4年] 指數(shù):2
[VIP第4年] 指數(shù):2 通過認(rèn)證
通過認(rèn)證 





