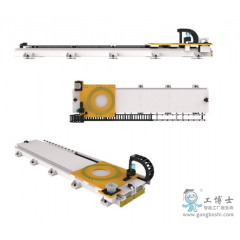
GBS-01-01-W5000型,機器人第七軸行走軌道
1、技術參數(shù):
|
序號
|
項目
|
參數(shù)
|
備注
|
|
1
|
運動板額定負載
|
5000kg
|
|
|
2
|
機器人臂展
|
3300mm
|
|
|
3
|
機器人抓取
|
270-600kg
|
|
|
4
|
減速比
|
1:10
|
可更換減速比
|
|
5
|
運行速度
|
100-1665mm/S
|
可調速
|
|
6
|
加速度
|
1500mm/m²
|
|
|
7
|
加、減速時間
|
0.75/S
|
各給時間
|
|
8
|
有效行程
|
按需求
|
|
|
9
|
外形尺寸(長×寬×高)
|
W=900mm,H=430mm,L=有效行
程加 1800mm
|
|
|
10
|
重復定位精度
|
±0.05mm
|
|
|
11
|
安裝方式
|
水平
|
|
|
12
|
供電條件
|
三相 380V±10 50HZ
|
|
|
13
|
驅動方式
|
機器人外部軸(5-7KW)
|
|
|
14
|
絕緣等級
|
HP64
|
|
二、行走軌道概述
1:軌道本體材質為鋼板方管焊接件,標準長度拼接件,長度分為 6 米、5 米、4 米、3 米、2 米、1.5 米五種規(guī)可拼接;
2:拼接長度超過 15 米由第三方激光水平儀檢測,出檢測精度數(shù)據(jù);
3: 軌道本體為鋼件 焊接后退火去應力后拋丸處理表面再進行機械加工直線導軌、齒條和拼接安裝面。
4: 軌道與地面連接板連接可水平調節(jié),地面連接板由 M20 化學螺栓固定。
5: 機器人安裝板材質為 45#鋼,螺栓連接位置加厚鋼板保證螺紋緊固連接。
6: 拖鏈安裝在軌道的外側或內測,由拖鏈槽加支架固定,彎曲半徑 R300 減少線纜的易損度,如長度 8 米以上需要增加滾輪支架。
7: 硬限位安裝在軌道的兩端,材質為 Q235 鋼件加彈性緩沖器。
8: 限位開關安裝在機器人運動板上,限位方式為接觸式
9: 該設備表面處理為噴漆,顏色為 RAL 7036 深灰色
10. 鈑金式防塵罩(半封閉式)3mm 花紋板折彎 螺絲連接11:潤滑系統(tǒng) 進口潤滑泵分流器潤滑滑塊,齒條潤滑配有毛氈輪12:原點標識安裝在機器人運動板上,刻度安裝在軌道兩側。13:直線導軌水平安裝,滑塊為 6 個 由潤滑系統(tǒng)集中供油
14:齒輪齒條為斜齒 齒面研磨級,精度為 6 級,配有潤滑輪
三、詳細配置:
|
序號
|
名稱
|
***/規(guī)格
|
備注
|
|
1
|
軌道本體
|
工博士W=900mm,H=430mm,L=按要求
|
乙方提供
|
|
2
|
行星減速機
|
德國阿爾法
|
乙方提供
|
|
3
|
直線導軌
|
日本 THK
|
乙方提供
|
|
4
|
滑塊
|
日本 THK
|
乙方提供
|
|
5
|
齒輪齒條
|
臺灣 YYC 斜齒
|
乙方提供
|
|
6
|
潤滑系統(tǒng)
|
工博士
|
乙方提供
|
|
7
|
防塵罩
|
工博士/半封閉鈑金式
|
乙方提供
|
|
8
|
硬限位彈性緩沖器
|
工博士
|
乙方提供
|
|
9
|
機器人安裝板
|
工博士/1600*1200*40mm
|
乙方提供
|
|
10
|
地面連接板
|
工博士
|
乙方提供
|
|
11
|
拖鏈
|
肯泰特/H=55mm W=200mm R300mm
|
乙方提供
|
|
12
|
減速機連接法蘭
|
工博士
|
乙方提供
|
|
13
|
伺服電機
|
5-7KW
①聯(lián)動 機器人外部軸或②不聯(lián)動 伺服電機
|
|
|
14
|
調節(jié)螺栓
|
M20 細牙螺紋
|
乙方提供
|
|
15
|
限位傳感器
|
日本歐姆龍
|
乙方提供
|
四、顏色
|
序號
|
項目
|
顏色
|
色號
|
備注
|
|
1
|
軌道本體
|
深灰
|
RAL7036
|
平光
|
|
2
|
機器人運動板
|
中黃
|
RAL5015
|
橘紋
|
|
3
|
連接件
|
藍白鋅
|
|
啞光
|
|
4
|
拖鏈槽
|
藍白鋅
|
|
啞光
|


絡警察")


絡110")
 在線客服
在線客服
 企業(yè)微信
企業(yè)微信






 [VIP第4年] 指數(shù):1
[VIP第4年] 指數(shù):1 通過認證
通過認證