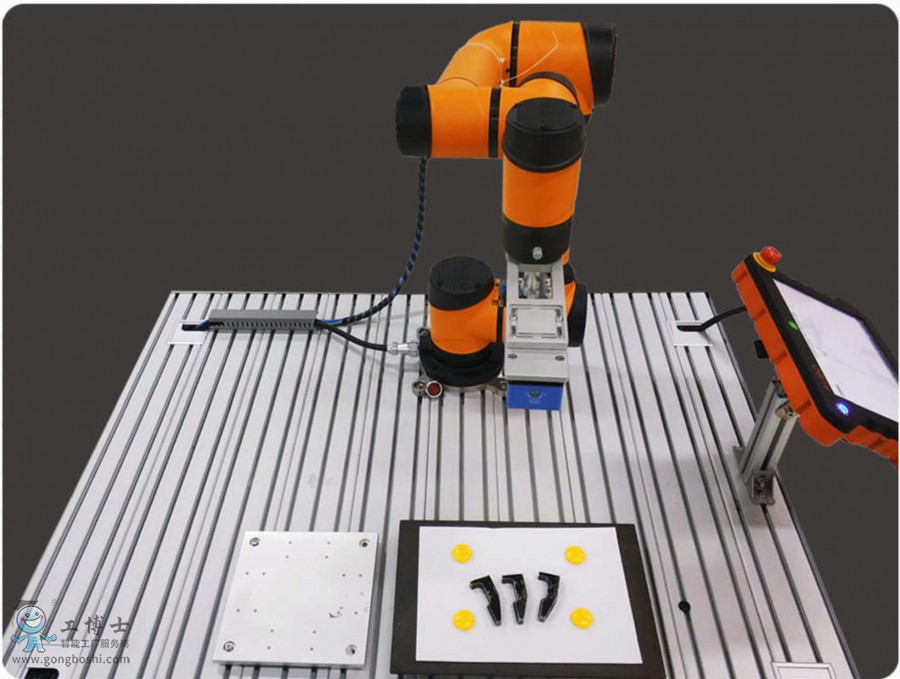
機器人視覺碼跺:AUBO-i5-WB4
應(yīng)用概述:AUBO-i5協(xié)作機器入通過視覺輔助, 識別并定位抓取, 實現(xiàn)對產(chǎn)品的無序自動識別、定位和分揀, 對無
序的產(chǎn)品實現(xiàn)有序碼放。
功能特點:
1、對工件質(zhì)量檢測, 完成不良產(chǎn)品剔除;
2、對散亂工件實現(xiàn)有序化碼放;
3、在示教器中可實時查看相機拍照狀態(tài);
4、提高了AUBO-i5協(xié)作機器入在工作中的柔性;
5、相機檢測位詈**, 保證夾取的精度要求;
6、相機體積小, 集成度高。
實訓(xùn)任務(wù):
• 機器入的本體認(rèn)知
• 機器入的示教器認(rèn)知與運動操作
• 機器入的拖動示教操作
• 機器入的基本參數(shù)、變量的配置及應(yīng)用
• 機器入的碰撞防護(hù)檢測操作
• 機器入的基本條件運動指令的認(rèn)知
• 機器入的工具坐標(biāo)系和用戶坐標(biāo)系的配置
• 機器入的基本接線方法
• 機器視覺系統(tǒng)的原理、使用和調(diào)試
• 機器入坐標(biāo)系統(tǒng)和機器視覺坐標(biāo)系統(tǒng)標(biāo)定及相互轉(zhuǎn)換
• 機器入與視覺系統(tǒng)綜合應(yīng)用的安裝與調(diào)試
• 機器入視覺系統(tǒng)模板設(shè)置、編程與調(diào)試
• 機器入系統(tǒng)的軟件二次開發(fā)編程
• 智能視覺圖像輸入編輯與調(diào)試
• 智能視覺結(jié)果給出編輯與調(diào)試
• 智能視覺尺寸比對測量
• 智能視覺角度測量


絡(luò)警察")


絡(luò)110")
 在線客服
在線客服
 企業(yè)微信
企業(yè)微信





證")
 [VIP第4年] 指數(shù):1
[VIP第4年] 指數(shù):1 通過認(rèn)證
通過認(rèn)證