UR機(jī)器人,RoboDK 仿真軟件,優(yōu)傲機(jī)器人
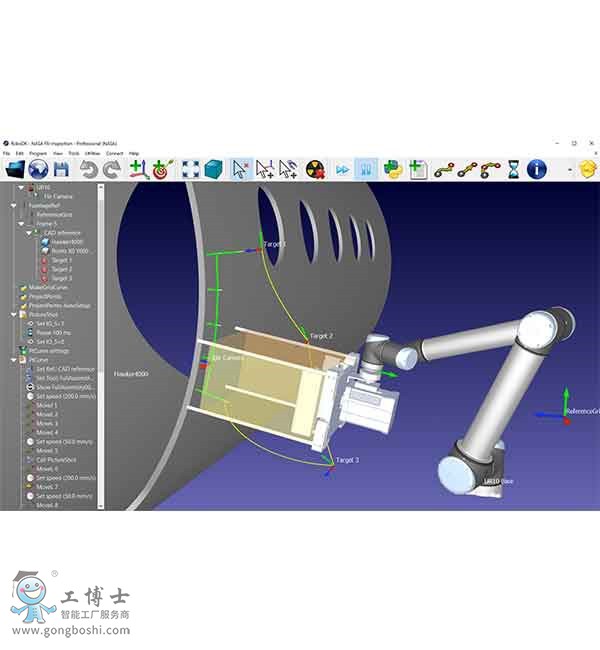
RoboDK 仿真軟件可以讓您充分利用 UR 機(jī)器人。只需點(diǎn)擊幾下,便可在電腦上離線仿真 UR 機(jī)器人、以及將 URP 和 SCRIPT 程序在機(jī)器人上。通過(guò) RoboDK 仿真和離線編程工具,您可以在生產(chǎn)環(huán)境外對(duì)機(jī)器人進(jìn)行編程,避免因車間編程導(dǎo)致的生產(chǎn)停工時(shí)間。
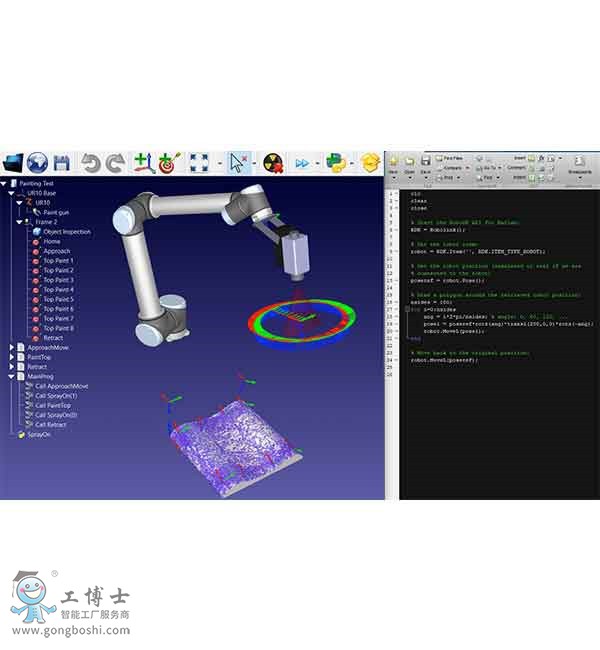
系統(tǒng)配備直觀的 RoboDK 圖形界面,無(wú)需編程技能即可操作。只需在計(jì)算機(jī)上操作幾步,便可輕松編程任何 UR 機(jī)器人。點(diǎn)擊以下鏈接,查看如何離線對(duì)機(jī)器人進(jìn)行噴漆或檢驗(yàn)應(yīng)用程序編程,只需幾分鐘即可完成: https://robodk.com/doc/en/Getting-Started.html
更高級(jí)的用戶還可以使用 RoboDK API 對(duì)機(jī)器人進(jìn)行編程。RoboDK API 支持用戶選擇 UR 機(jī)器人編程語(yǔ)言,包括 Python、c#、Visual Basic、c++ 和 Matlab。此外,該軟件還能夠簡(jiǎn)化重復(fù)性任務(wù)自動(dòng)化,以及將 3D 仿真環(huán)境集成入目標(biāo)項(xiàng)目的操作。
特性與優(yōu)勢(shì)
- 直觀的圖形用戶界面 - 無(wú)需編碼即可進(jìn)行機(jī)器人編程
- 拖放功能 - 幾分鐘即可設(shè)置好工作單元(工具、環(huán)境)
- 庫(kù)內(nèi)容豐富 - 為您的項(xiàng)目提供廣泛的工具、執(zhí)行器和傳感器選擇
- 支持 3D 模型 - 支持對(duì)象導(dǎo)入,以及使用 STL、STEP 和 IGES 等 3D 文件創(chuàng)建新工具
- 外部軸 - 集成外部軸,擴(kuò)展機(jī)器人的可達(dá)性
- 生成程序 – 只需單擊幾下即可獲取.URP和.SCRIPT程序
- 即時(shí)運(yùn)行程序 – 只需點(diǎn)擊幾下,便可直接執(zhí)行計(jì)算機(jī)上的程序
- 實(shí)時(shí)監(jiān)控 – 可在計(jì)算機(jī)屏幕上查看機(jī)器人狀態(tài)
- 機(jī)器人 CAM 插件 - 便于將 5 軸電腦數(shù)控工具路徑轉(zhuǎn)化為機(jī)器人程序,像操作 5 軸電腦數(shù)控機(jī)一樣操作計(jì)算機(jī)
- 自動(dòng)路徑求解 - 避免潛在的機(jī)器人誤差,包括奇點(diǎn)、關(guān)節(jié)限位、可達(dá)極限和碰撞
- 快速碰撞檢測(cè) - 方便定義希望規(guī)避的對(duì)象交互。
- 高級(jí)功能 - 支持在電腦上使用個(gè)人偏好的編程語(yǔ)言對(duì)機(jī)器人進(jìn)行編程,RoboDK API 支持的編程語(yǔ)言包括 Python、c#、Visual Basic、c++ 和 Matlab
- 模擬 2D 視覺(jué)相機(jī) - 可在模擬環(huán)境下測(cè)試圖像識(shí)別算法。
- 多機(jī)器人仿真 - 可對(duì)多個(gè)機(jī)器人進(jìn)行同步和編程操作,實(shí)現(xiàn)同時(shí)移動(dòng)。
- 便于自定義后置處理器 - 集成特定傳感器或執(zhí)行器,如夾爪、力控系統(tǒng)、圖像處理系統(tǒng)等。
是否含 URCap 插件:
不含。會(huì)生成 URP 和 SCRIPT 文件。后置處理器可連接至第三方庫(kù)。
兼容性:
UR3, UR5, UR10
CB2, CB3.0, CB3.1
套件內(nèi)容:
電子文檔,電子許可證密鑰,USB 軟件狗許可證選件(需額外支付 150 美元)
許可類型:
一次性購(gòu)買。可選購(gòu)維護(hù)更新服務(wù)。每臺(tái)電腦一份許可證。
了解更多信息,請(qǐng)點(diǎn)擊關(guān)注:UR優(yōu)傲機(jī)器人



絡(luò)警察")

中心")
絡(luò)110")
 在線客服
在線客服
 企業(yè)微信
企業(yè)微信





證")
") [VIP第5年] 指數(shù):1
[VIP第5年] 指數(shù):1 通過(guò)認(rèn)證
通過(guò)認(rèn)證