發那科機器人FANUC機器人 CR-4iA 協作機器人
采用LR Mate系列 機型的技術
容易學習
大量的機器人軟件 選項
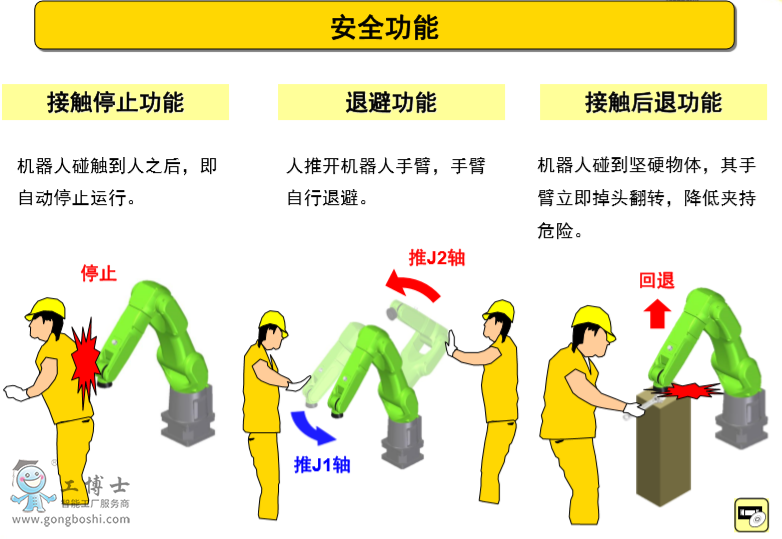
接觸停止功能
機器人碰觸到人之后,即自動停止運行。
退避功能
人推開機器人手臂,手臂自行退避。
接觸后退功能
機器人碰到堅硬物體,其手臂立即掉頭翻轉,降低夾持危險。
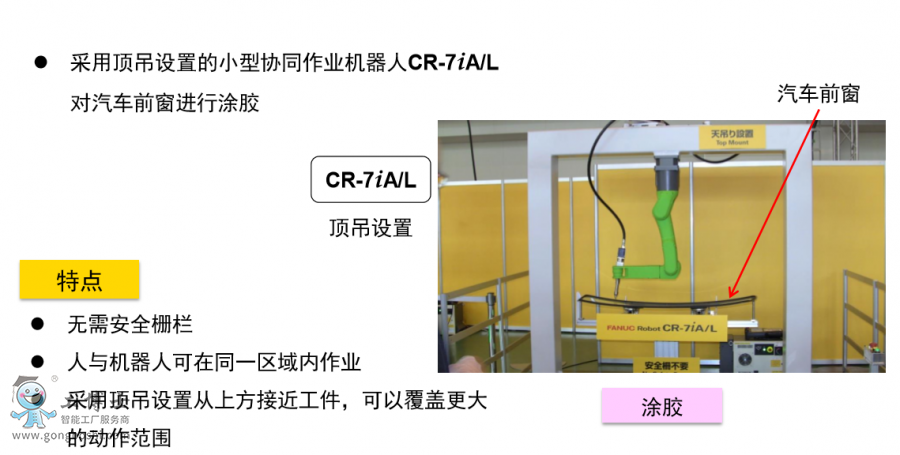
采用頂吊設置的小型協同作業機器人CR-7iA/L
對汽車前窗進行涂膠
特點
無需安全柵欄 人與機器人可在同一區域內作業 采用頂吊設置從上方接近工件,可以覆蓋更大
的動作范圍 采用頂吊設置可使地面空間得到有效利用
型號 CR-4iA 機構 多關節型機器人 控制軸數 6 軸(J1,J2,J3,J4,J5,J6) 可達半徑 550 mm 安裝方式 地面安裝、倒吊安裝、傾斜安裝
動作范圍
J1 340º J2 150º J3 354º J4 380º J5 200º J6 720º 手腕部*高運動速度(注釋1) 500 mm/s(*大1000 mm/s)(注釋2) 手腕部*大負載(注釋3) 4 kg J3手臂部*大負載(注釋4) 1 kg 手腕允許負載轉矩 J4 8.86 Nm J5 8.86 Nm J6 4.90 Nm 手腕允許負載慣量 J4 0.20 kgm² J5 0.20 kgm² J6 0.067 kgm² 驅動方式 交流伺服電機驅動 重復定位精度 ± 0.013 mm 機器人質量(注釋5) 48 kg 輸入電源功率(平均功耗) 1.2 kVA(0.5 kW)
安裝條件
環境溫度 : 0 ~ 45C 環境濕度 : 通常在75% RH以下(無結露現象),短期在95% RH以下(1個月之內) 注釋1)短距離運動時,可能達不到各軸的*高標稱速度。 注釋2)如果有安全傳感器在監控該區域(獨立安裝)。 注釋3)注釋4)包括設備和連接線纜等在內的所有質量不能超過此數值。 注釋5)不含機器人控制器的質量。
注意 請使用金屬帽(選項)和插頭蓋住未使用的連接器 和空氣端口,如果蓋帽遺失,未知的物質將會進入機 器人并造成麻煩。 出廠時,為避免灰塵,這些接口都由簡易的蓋帽 蓋住。請記住,這些蓋帽不足以用于工廠環境的保護。
在運輸中一定要使用特殊的運輸
設備和防滑裝置,并且不要在機器人和運輸設備使用掛鉤繩索。不要在機器人安裝時出現震動,否則可能會損壞內部傳感器。不要移除紅框內的部分螺栓,則可能會損壞傳感器。在安裝或移動運輸設備時,請插入機器人底部的填充板,否則可能會損壞內部傳感器。


 在線客服
在線客服
 企業微信
企業微信








 [VIP第3年] 指數:4
[VIP第3年] 指數:4 通過認證
通過認證