發那科機器人的型號 M-20iA/35M
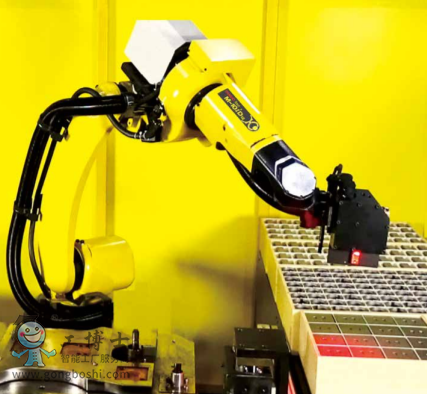
機構 多關節型機器人
控制軸數 6 軸(J1,J2,J3,J4,J5,J6)
可達半徑 1813 mm
安裝方式(注釋1) 地面安裝、倒吊安裝、傾斜安裝
動作范圍(注釋2) (*高速度)
J1 340/º370 º (180/ºs) J2 260 º (180/ºs) J3 458 º (200/ºs) J4 400 º (350/ºs) J5 280 º (350/ºs) J6 900 º (400/ºs)
手腕部*高運動速度 2000 mm/s
手腕部*大負載 35 kg J3
手臂部*大負載 12 kg
手腕允許負載轉矩 J4 110 Nm J5 110 Nm J6 60 Nm
手腕允許負載慣量 J4 4 kgm² J5 4 kgm² J6 1.5 kgm²
驅動方式 交流伺服電機驅動
重復定位精度 ± 0.04 mm
發那科機器人的型號 質量(注釋3) 252 kg
輸入電源功率(平均功耗) 3 kVA ( 1 kW )
安裝條件
環境溫度 : 0 ~ 45C 環境濕度 : 通常在75% RH以下(無結露現象),短期在95% RH以下(1個月之內) 振動加速度: 4.9 m/s²(0.5G)以下 注釋1)如采用傾斜安裝方式,機器人J1軸和J2軸的運動范圍將受到限制。 注釋2)短距離運動時,可能達不到各軸的*高標稱速度。 注釋3)不含機器人控制器的質量。
是在M-20iA/20M的基礎上改進而成
手腕部可搬運質量由20 kg增至35 kg
手腕允許負載轉矩增加2~2.4倍,允許慣量增加1.5~2倍
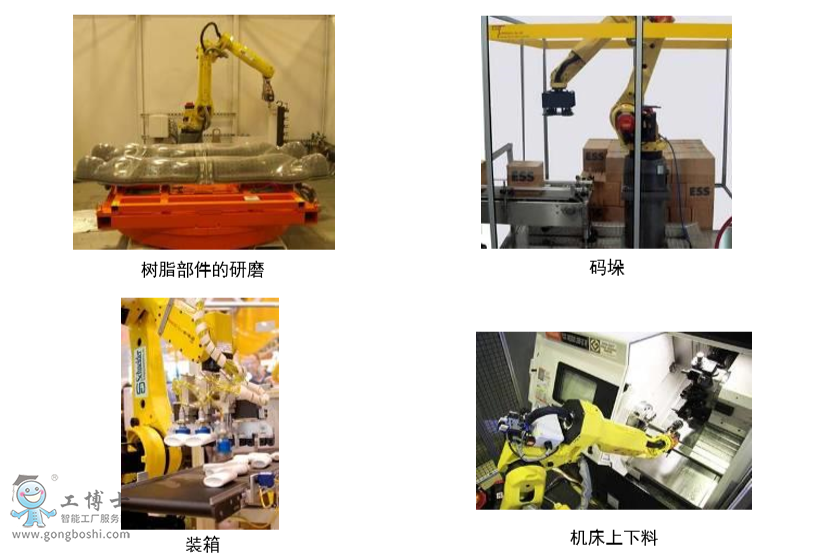
適用于狹小操作空間內的搬運操作
可使用ROBOGUIDE進行離線編程,從而縮減示教時間
配置內置視覺或力傳感器后,可使用智能應用功能


 在線客服
在線客服
 企業微信
企業微信







 [VIP第2年] 指數:4
[VIP第2年] 指數:4 通過認證
通過認證