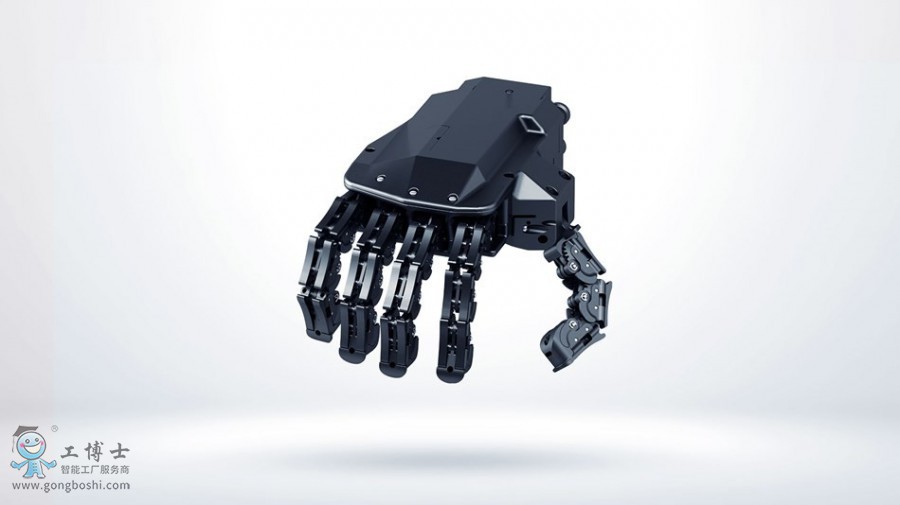
優傲機器人——QB SOFTHAND RESEARCH手型夾爪

適用:于以下應用
拾取與放置
機器維保
組裝
實驗室分析及測試
特性與優勢
●靈活、適應性強且功能強大
●19級擬人自由度、協同設計、單電機
●可脫位、自我修復的手指關節
●抓力62牛(夾點配置)
●標稱有效載荷1.7千克(夾點配置)
●從手掌完全張開到握緊拳頭,僅需1.1秒
●USB和RS485接口
●ROS兼容
●重量:500克
●反饋:電機位置和電機電流
使用方法
qb SoftHand Research通過兩種配置以機械方式調整抓握:
●夾持抓取
●強力抓取
使用提供的連接法蘭安裝夾爪,并按照手冊規定連接電纜。
將USB閃存盤插入機器人的示教器中,以安裝URCaps插件。
兼容性:
UR3, UR5, UR10
UR3e, UR5e, UR10e
CB3.1
軟件版本要求:
PolyScope 3.4或更高版本。
請聯系support@qbrobotics.com詢問歷史版本的兼容性。
配套使要求:
None
認證與準:
進行中
尉:
216x191x56毫米(開放式配置)


 在線客服
在線客服
 企業微信
企業微信








 [VIP第5年] 指數:1
[VIP第5年] 指數:1 通過認證
通過認證