SRA166/210-01A系列 特點
●更快更切實地
- 使機器人作業實現*短的循環時間。追求快速性和減震性的重量輕,高剛性的SRA。進而提高了全軸速度,也縮短了氣割動作時間。由此使生產性得到了飛躍性的提高。
●點焊的專家
●使用方便的機器人
- 使用方便。通過*新的機械元件和電機驅動控制,提高復位精度和驅動系的可靠性。
- 通過緊湊的本體,可進行更高緊密的設置。
●節能,節源
- 舊款機型相比減輕20%重量的機器人本體以及采用*新的電機驅動控制的*佳速度控制,實現了電力比舊款機型降低15%的目標。
●適用的控制裝置
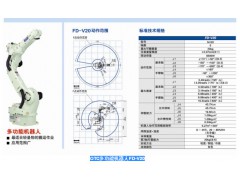
SRA166/210-01A系列 外形尺寸及動作范圍



(*1)本產品的額定功率,規格,外部尺寸等如需改良而變更,恕不另行通告。
(*2)如果本產品的*后使用者與軍事相關,或用于兵器等的制造,可能成為“外匯及國際貿易法”規定的出口限制的對象。出口時,請進行充分的審查和辦理所需的出口手續。
本體規格
| 機器人類型 |
SRA166-01A |
SRA210-01A |
| 結構 |
關節型 |
| 自由度 |
6 |
| 驅動方式 |
AC伺服方式 |
*
大
動
作
范
圍 |
臂 |
J1 |
旋回 |
±3.14rad (±180°) |
| J2 |
前后 |
+1.05~-1.40rad (+60°~-80°) |
| J3 |
上下 |
+2.62~-2.56rad (+150°~-146.5°) |
手
腕 |
J4 |
轉動2 |
±3.67rad (±210°) |
| J5 |
彎曲 |
±2.09rad (±120°) |
| J6 |
轉動1 |
±3.58rad (±205°) |
*
大
速
度 |
臂 |
J1 |
旋回 |
2.18rad/s (125°/s) |
2.01rad/s (115°/s) |
| J2 |
前后 |
2.01rad/s (115°/s) |
1.83rad/s (105°/s) |
| J3 |
上下 |
2.11rad/s (121°/s) |
1.97rad/s (113°/s) |
手
腕 |
J4 |
轉動2 |
3.14rad/s (180°/s) |
2.44rad/s (140°/s) |
| J5 |
彎曲 |
3.02rad/s (173°/s) |
2.32rad/s (133°/s) |
| J6 |
轉動1 |
4.54rad/s (260°/s) |
3.49rad/s (200°/s) |
| 可搬質量 |
手腕部 |
166kg |
210kg |
| 手臂上※1 |
15kg (*大 60kg) |
| 容許靜負荷扭矩 |
J4 |
轉動2 |
951Nm |
1,337Nm |
| J5 |
彎曲 |
951Nm |
1,337Nm |
| J6 |
轉動1 |
490Nm |
720Nm |
| 容許*大慣性力矩※2 |
J4 |
轉動2 |
88.9kgm2 |
141.1kgm2 |
| J5 |
彎曲 |
88.9kgm2 |
141.1kgm2 |
| J6 |
轉動1 |
45.0kgm2 |
79.0kgm2 |
| 位置反復精度※3 |
±0.1mm |
±0.15mm |
| 周圍溫度 |
0~45°C |
| 設置條件 |
地面安裝,標高 1,000m以下 |
| 本體質量 |
1,060kg |
1,090kg |
1[rad]=180/π[°] 1[Nm]=1/9.8[kgfm]
(*1) 第1手臂部負荷根據安裝位置,手腕負荷質量而變化。
(*2) 手腕容許慣性力矩因手腕負荷條件而不同,請注意。
(*3)以JIS B 8432為依據。


 在線客服
在線客服
 企業微信
企業微信







 [VIP第3年] 指數:4
[VIP第3年] 指數:4 通過認證
通過認證