三指夾爪是實(shí)現(xiàn)*大通用性和靈活性的*佳選擇。它可以拾取任何形狀的物體。
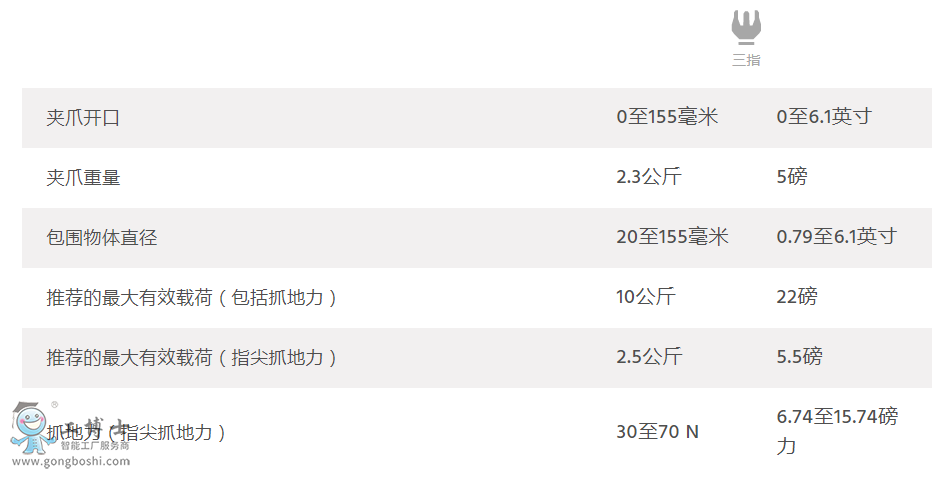
robotiq三指夾爪技術(shù)參數(shù)
應(yīng)用領(lǐng)域
三指自適應(yīng)夾爪是高級制造和機(jī)器人研究的理想選擇。它適應(yīng)物體的形狀以獲得牢固的抓地力,因此您可以專注于任務(wù)而不是抓握。
取放
夾爪功能4種握把類型
捏模式
寬模式
剪刀模式
基本模式
分別控制手指
獲得每個(gè)手指的反饋
即插即用
使用我們的Gripper URCap在幾分鐘內(nèi)安裝和編程機(jī)器人
通過每個(gè)手指的力,位置和速度控制以及4種不同的抓握模式,三指抓爪幾乎可以拾取任何東西。



絡(luò)警察")

中心")
絡(luò)110")
 在線客服
在線客服
 企業(yè)微信
企業(yè)微信






員")
證")