Kawasaki弧焊機器人
BA系列(5~20kg)弧焊機器人
具有自適應焊接能力,熟練而靈活的弧焊機器人
川崎的弧焊機器人使用*新的弧焊技術,可以媲美一個熟練焊接工人的焊接品質。該機器人標準配備有弧焊專用軟件,使工藝路徑的編程快速而容易。焊接時,自適應焊接功能可用來修改機器人的位置、編織圖案和速度,以填充各種接合處。其內置的智能性、靈活性和高**度令川崎的弧焊機器人非常適合各種弧焊應用。
新型弧焊機器人
采用點焊大型【B系列】機器人中廣受好評的手腕中空結構。
使得線纜的整理變得更加簡單,焊絲供給裝置和線纜類的處理也更加輕松,在實現了焊絲穩定供給的同時,將線下討論處理的更加簡單。
Kawasaki BA006L 概述:
負載 6 kg
臂展 2036mm
典型應用:
弧焊
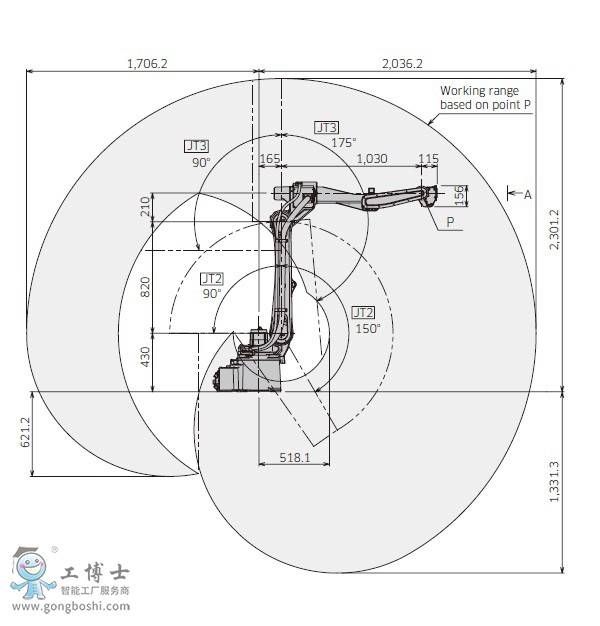
動作范圍與尺寸
點擊下面的圖片來查看。圖中所示尺寸單位為毫米(mm)。
BA006L的規格
| BA006L的規格 |
| 手臂類型 |
多關節型機器人 |
| 自由度 |
6 |
| *大負載能力 (kg) |
6 |
| *大臂展 (mm) |
2,036 |
| 重復定位精度 (mm) 1 |
±0.08 |
| 動作范圍 (°) |
手臂旋轉 (JT1) |
±165 |
| 手臂前后 (JT2) |
+150 - −90 |
| 手臂上下 (JT3) |
+90 - −175 |
| 手腕旋轉 (JT4) |
±180 |
| 手腕彎曲 (JT5) |
±135 |
| 手腕扭轉 (JT6) |
±360 |
| *大速度 (°/s) |
手臂旋轉 (JT1) |
210 |
| 手臂前后 (JT2) |
210 |
| 手臂上下 (JT3) |
220 |
| 手腕旋轉 (JT4) |
430 |
| 手腕彎曲 (JT5) |
430 |
| 手腕扭轉 (JT6) |
650 |
| 允許負載扭矩 (N•m) |
手腕旋轉 (JT4) |
12 |
| 手腕彎曲 (JT5) |
12 |
| 手腕扭轉 (JT6) |
3.75 |
| 允許負載慣量 (kg•m2) |
手腕旋轉 (JT4) |
0.4 |
| 手腕彎曲 (JT5) |
0.4 |
| 手腕扭轉 (JT6) |
0.07 |
| 重量 (kg) |
160 |
| 安裝方式 |
地面, 懸掛 |
| 安裝條件 |
環境溫度 (°C) |
0 - 45 |
| 相對濕度 (%) |
35 - 85 (無結露) |
| 控制柜 / 所需電源 (kVA) |
型號 面向北美 |
E01 / 5.6 |
| 型號 面向歐洲 |
| 型號 面向日本 & 亞洲 |
1: 以ISO9283為基準。
了解更多川崎機器人產品信息:http://hyundiy.gongboshi.com


 在線客服
在線客服
 企業微信
企業微信








 [VIP第6年] 指數:4
[VIP第6年] 指數:4 通過認證
通過認證 









