samson薩姆森4763型電動氣動定位器
Design and principle of oper
ation
The eledtropneumahc postioner is used toassign the walve posilion Lonrolld variableltlo the input signal [rerence varioblel. Thepositioner compares the control signal of acontrol system to the travel of the conlrolvalve. and isues a signal pressure loulputvariable] for the pneumatic actualor.
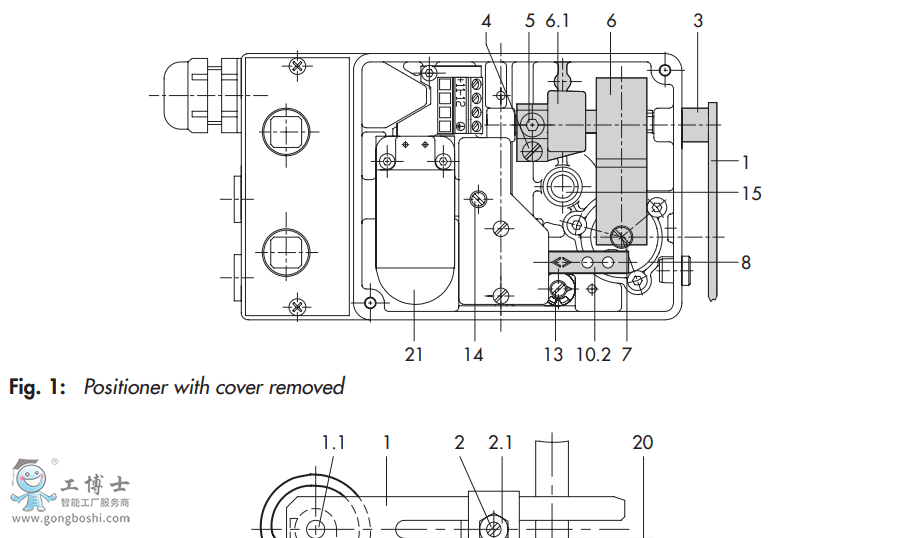
The posilioner consis of an electropneumatic converler unid 121) and a pneumatic unitequipped. with a lewer (11, shalt [L,1] andrange spring as well as the pneumatic con.troll syslem with nozzle, flapper piate andboosler. The DC control signal,eg. 4o20 mA, issed by the ontoller, is tronsmitled lo the electropneumotie converler unitli/p comverlerl where it is coverled intoproportional pessure signal Pe
Any change of the input current signal cous-es a proportional change of the air pressureP. fed to he pneumatic control systemThe air pressure p, produces a force whichacls on the surface of the measuring dia-phragm. (81 and is compored to the force ofthe range spring 16.
The mohon of the measuring diaphragm (8)is ranserred to the flapper plate (10.2) overthe feeler pin (9.11 and the nozzle [10.1)1 re.leases pressure. Any change of either the airpressure p, or the valve slem position cousesthe pressure lo change in the booster (12)connedled downsream of the nozzle. Thesignal pressure Pu which is released causesthe plug slem to asume a position based onthe reference wariable
The adjustable volume restriction Q (14) andXp lgain) restriction (13) are used to opti-mize the control loop of the positioner.The range spring (6), which can be ex-
changed, is assigned to both the rated valvetravel and the span of the reference variable.

了解詳情請點(diǎn)擊:
samson薩姆森



絡(luò)警察")

中心")
絡(luò)110")
 在線客服
在線客服
 企業(yè)微信
企業(yè)微信






證")
 [VIP第3年] 指數(shù):4
[VIP第3年] 指數(shù):4 通過認(rèn)證
通過認(rèn)證 






