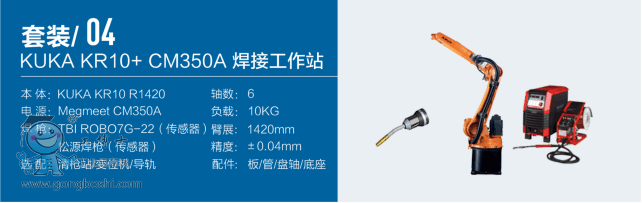
本體:KUKA KR10 R1420 軸數:6
電源:Megmeet CM350A 負載:10KG
焊槍:TBI ROBO7G-22(傳感器) 臂展:1420mm
松源焊槍(傳感器)
配槍:板/管/盤軸/底座 精度:±0.04mm
選配:清槍站/變位機/導軌
焊接機器人是從事焊接(包括切割與噴涂)的工業機器人。根據國際標準化組織(ISO)工業機器人術語標準的定義,工業機器人是一種多用途的、可重復編程的自動控制操作機(Manipulator),具有三個或更多可編程的軸,用于工業自動化領域。為了適應不同的用途,機器人*后一個軸的機械接口,通常是一個連接法蘭,可接裝不同工具或稱末端執行器。焊接機器人就是在工業機器人的末軸法蘭裝接焊鉗或焊(割)槍的,使之能進行焊接,切割或熱噴涂。
隨著電子技術、計算機技術、數控及機器人技術的發展,自動弧焊機器人工作站,從60年代開始用于生產以來,其技術已日益成熟,主要有以下優點:
1)穩定和提高焊接質量;
2)提高勞動生產率;
3)改善工人勞動強度,可在有害環境下工作;
4)降低了對工人操作技術的要求;
5)縮短了產品改型換代的準備周期,減少相應的設備投資。
因此,在各行各業已得到了廣泛的應用
焊接機器人主要包括機器人和焊接設備兩部分。機器人由機器人本體和控制柜(硬件及軟件)組成。而焊接裝備,以弧焊及點焊為例,則由焊接電源,(包括其控制系統)、送絲機(弧焊)、焊槍(鉗)等部分組成。


 在線客服
在線客服
 企業微信
企業微信








 [VIP第3年] 指數:4
[VIP第3年] 指數:4 通過認證
通過認證