激光具有高強(qiáng)度、高度方向性、空間同調(diào)性、窄帶寬和高度單色性等優(yōu)點(diǎn),激光干涉儀,則是以激光波長為已知長度,利用邁克耳遜干涉系統(tǒng)測量位移的通用長度測量。激光干涉儀是激光在計(jì)量領(lǐng)域中*成功的應(yīng)用之一。
國產(chǎn)激光干涉儀(SJ6000)采用高穩(wěn)定氦氖激光器、激光雙縱模熱穩(wěn)頻技術(shù),實(shí)現(xiàn)快速(約6分鐘)、高精度(0.05ppm)、抗干擾能力強(qiáng)、長期穩(wěn)定性好的激光輸出;采用高精度環(huán)境補(bǔ)償模塊、高精度激光干涉信號處理系統(tǒng)、高性能計(jì)算機(jī)控制系統(tǒng)技術(shù),結(jié)合線性鏡組能實(shí)現(xiàn)0.5ppm精度的線性測量;結(jié)合相應(yīng)鏡組還能實(shí)現(xiàn)角度、直線度(平行度)、平面度、垂直度、回轉(zhuǎn)軸等參數(shù)的測量,并進(jìn)行動態(tài)分析。
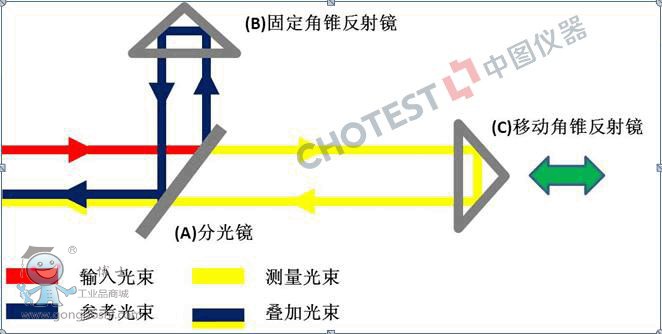
國產(chǎn)激光干涉儀(SJ6000)工作原理:
激光干涉儀發(fā)射單一頻率光束射入線性干涉鏡,然后分成兩道光束,一道光束(參考光束)射向連接分光鏡的反射鏡,而第二道透射光束(測量光束)則通過分光鏡射入第二個反射鏡,這兩道光束再反射回到分光鏡,重新匯聚之后返回激光器,其中會有一個探測器監(jiān)控兩道光束之間的干涉(見圖)。若光程差沒有變化時,探測器會在相長性和相消性干涉的兩極之間找到穩(wěn)定的信號。若光程差有變化時,探測器會在每一次光程變化時,在相長性和相消性干涉的兩極之間找到變化信號,這些變化會被計(jì)算并用來測量兩個光程之間的差異變化。
國產(chǎn)激光干涉儀(SJ6000)技術(shù)參數(shù):
系統(tǒng)性能
² 測量方式:單頻
² 穩(wěn)頻精度:0.05ppm
² 動態(tài)采集頻率:50 kHz
² 預(yù)熱時間:約6分鐘
² 工作溫度范圍:(0~40)℃
² 環(huán)境溫度范圍:(0~40)℃,環(huán)境濕度:(0~95)%RH
² 存儲溫度范圍:(-20~70)℃
環(huán)境補(bǔ)償示值誤差
² 空氣溫度傳感器:±0.1℃ (0~40)℃,分辨力0.01℃
² 材料溫度傳感器:±0.1℃ (0~40)℃,分辨力0.01℃
² 空氣濕度傳感器:±6%RH (0~95) %RH
² 大氣壓力傳感器:±0.1kPa
線性測量
² 測量距離:(0~40)m
² 測量精度:0.5ppm (0~40)℃
² 測量分辨力:1nm
² 測量*大速度:4m/s
角度測量
² 軸向量程:(0~15)m
² 測量范圍:±10°
² 測量精度:±(0.04%R)″ (R為顯示值,單位:″)
² 測量分辨力:0.1″
平面度測量
² 軸向量程:(0~15)m
² 測量范圍:±1.5 mm
² 測量精度:±(0.6%R+0.02 M2) μm (R為顯示值,單位:μm;M為測量距離,單位:m)
² 基板尺寸:180mm可調(diào),360mm可調(diào)
測量分辨力:0.1μm
直線度測量
² 軸向量程:(0.1~4.0)m
² 測量范圍:±3mm
² 測量精度:±(0.5+0.1%R +0.1M2) μm (R為顯示值,單位:μm;M為測量距離,單位:m)
² 測量分辨力:0.01μm
垂直度測量
² 軸向量程:(0.1~3.0)m
測量范圍:±3mm
² 測量精度:±(0.5+0.5%R+0.2M)″ (R為顯示值,單位:″;M為測量距離,單位:m)
² 測量分辨力:0.01μm/m
回轉(zhuǎn)軸精度測量
² 角度測量范圍:(0~360)°
² 測量精度:±1″
*高轉(zhuǎn)速:10rpm
鋰電池供電,藍(lán)牙傳輸數(shù)據(jù)。



絡(luò)警察")


絡(luò)110")
 在線客服
在線客服
 企業(yè)微信
企業(yè)微信






證")





