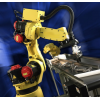
機器人裝配
裝配機器人是柔性自動化裝配系統的核心設備,由機器人操作機、控制器、末端執行器和傳感系統組成。機器人的結構類型有水平關節型、直角坐標型、多關節型和圓柱坐標型等;控制器一般采用多CPU或多級計算機系統,實現運動控制和運動編程;末端執行器為適應不同的裝配對象而設計成各種手爪和手腕等;傳感系統又來獲取裝配機器人與環境和裝配對象之間相互作用的信息。
裝配機器人的大量作業是軸與孔的裝配,在軸與孔存在誤差的情況下進行裝配,需要機器人具有動作的柔順性。主動柔順性是根據傳感器反饋的信息調整機器人手部動作,而從動柔順心則利用不帶動力的機構來控制手爪的運動以補償其位置誤差。
裝配機器人主要用于各種電器制造(包括家用電器,如電視機、錄音機、洗衣機、電冰箱、吸塵器)、小型電機、汽車及其部件、計算機、玩具、機電產品及其組件的裝配等方面。
裝配機器人特點
每臺組裝
機器人手臂可根據工藝需要配備不同工裝,以滿足未來生產線多批次、小批量的多樣生產要求,只需要簡單地編程及工裝更換即可實現快速切換。
機器人的高精度與作業的穩定性,可用于精益工業生產過程。
裝配力控制。利用智能力/轉矩運動技術進行零部件裝配,同時消除了零件卡死和損壞的風險。
視覺功能,引導機器人正確識別和抓取工件,傳送到精確裝配位置。
機器人投入產出比高,設備回收期短。
更多機器人裝配相關應用
機器人點膠: 點膠作業需要的材料被移動從一個位置到另一個位置。的一致,準確的動作的
工業機器人使它們非常適合配藥。
機器人密封: 粘接和密封是在生產過程中使用粘合劑或密封劑的過程。粘接和密封的機器人可用來增加期望這一進程的速度和準確性。機器人粘接和密封被廣泛地用于組裝電器小部件、電子元件表面貼裝、汽車部件貼裝等,具有廣泛的工藝應用。



 在線客服
在線客服
 企業微信
企業微信